Projects and Experiences
Here are some descriptions of the major projects I have worked on. Most of these projects have source code hosted on my github profile. My professional resume can also be found below.
Graduate Work
Within my graduate studies, I am working on a thesis project under the guidance of Dr. Bryan Van Scoy and Dr. Peter Jamieson. My research topic is on the use of a simple swarm control algorithm, the Reynolds Boid Algorithm, and implementing control barrier functions to acheive safety-critical control. My current work on the project can be found on my github.
The Boids Algorithm is a simple algorithm for controlling agents to simulate the flocking movements of birds. This algorithm has a weight on the motion of the agents that influences them to keep spacing, however this simple algorithm has scenarios where it fails and agents collide. I, along with my mentors, are exploring these scenarios and mitigating the risk using safety-critical control algorithms. Currently this work is being done in a simulation with the goal of implementing it on a physical swarm of mobile robots.
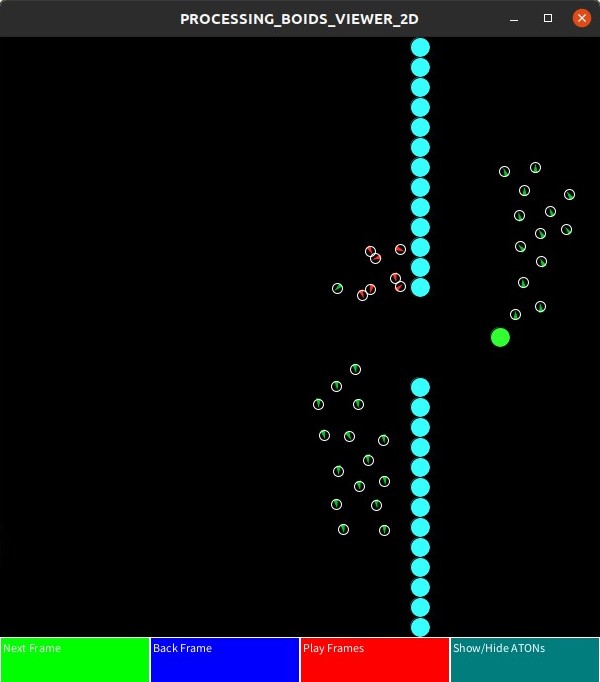
A view of a swarm of agents in our simulation can be seen here. In the siumulation, green arrows are the currently living agents that are forming flocks and moving around the arena. Agents that have had a collision and "died" are shown in red. The agents seek the green goal circle while avoiding each other, the boundaries, and the blue obstacle circles.
Undergraduate Work
Throughout my undergraduate years, I have taken many courses related to my field. I have taken courses such as circuit analysis, computer hardware and architechture, FPGA programming, communications systems and networking, object oriented programming and data structures, linear algebra, probability and statistics, and calculus 1-3.
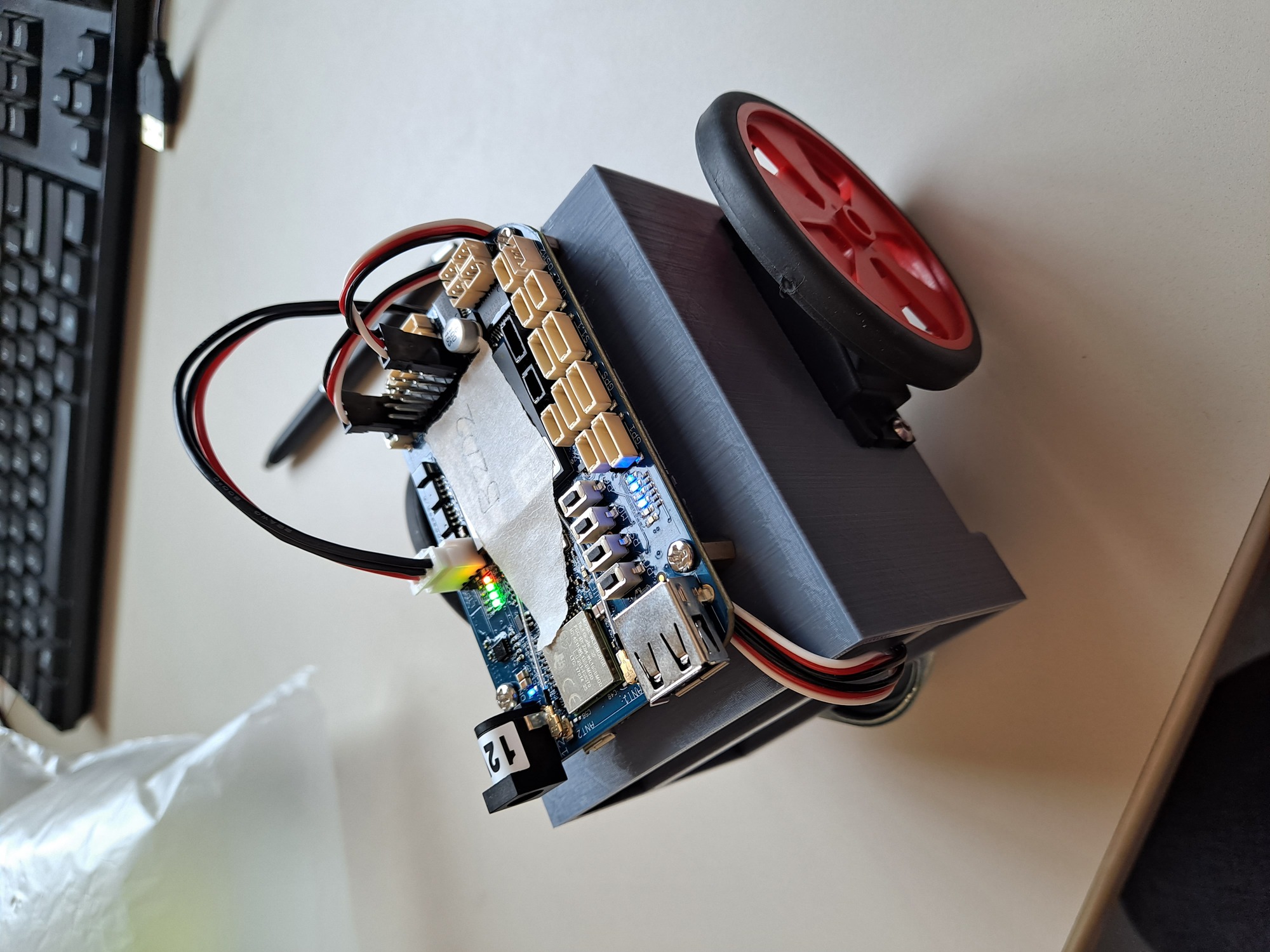
I have also worked on many individual and group projects, with the largest project being my senior capstone project. Working with two other seniors, we developed the base infrastructure for a robot swarm from the ground up. This included designing a mobile robot agent (seen in the picture) which used a Beagle Bone Blue board and a custom modeled chassis. Our group was able to coordinate two agents moving simulataneously to form the letters "MU" for Miami University.